A estas alturas del curso el sensor de luz no tiene mucho misterio: consta de un led de luz roja en la parte inferior del frontal y el sensor de luz en la superior. Este sensor mide la intensidad de luz reflejada por los objetos y, en cierta manera, también puede funcionar como un rudimentario sensor de color ya que los diferentes colores son clasificados en escala de grises.
Adjunto los enlaces de Dropbox para descargar los PDF* que contienen la documentación necesaria para la actividad de la estación de generación de energía solar y la turbina eólica.
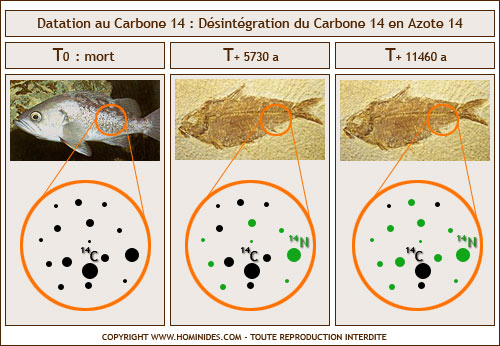
El método de datación por carbono-14 es el más fiable para conocer la edad de muestras orgánicas de menos de 45.000 ó 50.000 años. Para determinar la edad de restos con mayor antigüedad se utilizan otros radioisótopos junto con el análisis de estratos.
El carbono tiene tres isótopos: carbono-12, carbono-13 y carbono-14. Los isótopos son átomos del mismo elemento (tienen el mismo número atómico Z - la misma cantidad de protones en el núcleo -) que tienen diferente número másico A (diferente cantidad de neutrones en su núcleo).
Teniendo en cuenta que el número de neutrones en un núcleo se calcula realizando A - Z, se deduce que los isótopos 12C, 13C y 14C, tienen, respectivamente, 6, 7 y 8 neutrones en su núcleo.
Mientras que los isótopos 12 y 13 del carbono son estables, no ocurre lo mismo con el 14C, que tiene un periodo de semidesintegración de 5730 +/- 40 años. El periodo de semidesintegración o "semivida" es el tiempo que debe transcurrir para que se desintegren la mitad de los radioisótopos iniciales en una muestra.
El origen del carbono-14 está principalmente en la atmósfera, donde los rayos cósmicos de alta energía actúan sobre los átomos de nitrógeno-14 (80% de la composición del aire que respiramos) transformándolo en carbono-14. Se produce un equilibrio de formación y degradación 14N<---------->14C.
Este carbono-14 se mezcla con los otros isótopos del carbono, es asimilado en forma de CO2 por las plantas, y posteriormente pasa a los animales mediante la cadena trófica (cadena alimentaria), de tal manera que los seres vivos absorbemos constantemente 14C hasta que morimos. De ahí que sea un método de datación para muestras orgánicas y no sirva para las inorgánicas.
¿QUÉ PASA CUANDO UN SER VIVO MUERE?
Ya no absorbe más 14C y este carbono sufrirá algunas transformaciones. Hay que recordar que el 14C es un isótopo inestable y por lo tanto tenderá a "recuperar su forma original", es decir, se convertirá otra vez en 14N mediante una desintegración beta. La conversión del 14C en 14N viene determinada por el periodo de semidesintegración que he comentado en el inicio del post, así que después de aproximadamente 5730 años, la mitad de esos átomos de 14C se habrán convertido en 14N. Esto último nos sirve para la datación ya que los restos orgánicos más antíguos tienen menos 14C y más 14N.
¿CÓMO SABEMOS LA CANTIDAD INICIAL DE 14C QUE TENÍA UN FÓSIL?
Simplificando, y sin entrar en detalles técnicos, mientras estamos vivos las ganancias y pérdidas de 14C en nuestro organismo son prácticamente las mismas, esta cantidad de 14C se mantiene constante y conicide con la cantidad de 14C atmosférico. La proporción entre 14C y el carbono total es constante e igual en todos los organismos desde que "nacen" hasta que mueren.
La clave para entender esto último es la proporción entre 14C/carbono total, no estamos hablando de cantidades absolutas: un ser humano tiene más cantidad de carbono que un ratón y, lógicamente, tendrá más 14C, pero la proporción 14C/carbono total es la misma en ambos organismos.
¿CÓMO SABEMOS LA CANTIDAD DE 14C QUE HABÍA EN LA ANTIGÜEDAD EN LA ATMÓSFERA?
Conocemos la cantidad de 14C existente en la atmósfera en épocas antíguas mediante el análisis de muestras de madera con edades conocidas (analizando los anillos de los troncos de los árboles Dendrocronología). Realizando algunas pequeñas correcciones podemos realizar una datación con bastante exactitud.
El robot submarino "Hercules" se utiliza con propósito de investigación científica y puede descender hasta una profundidad máxima de 4000 metros. También se utiliza para recuperar restos de navíos hundidos e investigaciones arqueológicas en fondos marinos. Podéis ver un modelo similar a este robot en el documental del RMS Titanic enlazado en el cuaderno del alumno.
Este robot submarino o ROUV (remotely operated underwater vehicle), además de las herramientas habituales como brazos articulados para recoger muestras, contiene un sistema de grabación de vídeo de alta definición y varios sensores de presión, temperatura y salinidad del agua.
El peso del vehículo (fuera del agua) es de 2.450 Kg y sus dimensiones son 3,4m x 2,8m x 2,3m. Podéis sus partes y componentes pinchando aquí
Los circuitos electrónicos no son inmunes a la radiación. Siempre se debe incluir un blindaje de protección en los robots, sondas y cohetes para evitar daños en sus memorias debido a la radiación cósmica. Además, los robots espaciales siempre llevan sistemas informáticos redundantes (por duplicado) para evitar pérdidas millonarias por un funcionamiento defectuoso del ordenador principal.
En el caso de los robots que se utilizan en los desastres nucleares, tenemos el precedente del accidente de Chernobyl en el que los robots dejaban de funcionar, en el mejor de los casos, en menos de media hora: se bloqueaban a los pocos minutos, se movían sin control, e incluso algunos se caían desde el tejado de la central.
La alternativa fue el uso de liquidadores humanos que podían sustituir 18 meses de "mili" rusa por dos minutos sobre los restos de la azotéa de la central nuclear.
Artículo sobre los robots en Chernobyl en el blog RUSADAS aquí
Artículo sobre los tres héroes (humanos) de Chernobyl en el BLOG DE YURI aquí
En el caso de Fukushima se ha enviado un robot para inspreccionar el material fundido de la vasija del reactor y "solo" ha aguantado tres horas. Que no es poco.
En la fabricación de un Lamborgini Murciélago se combinan el arte y la ingeniería para construir un vehículo con un motor de 12 cilindros en V que es capaz de acelerar de 0 a 100 Km/h en aproximadamente 3 segundos, y alcanzar una velocidad máxima que supera los 300 Km/h.
Tráiler oficial con demo técnica de las Google Glass.
Vídeo de la presentación en Murcia de las Google Glass en agosto del 2.013 por la Asociación de Divulgación Científica de la Región de Murcia (ACD Murcia). Enlace a la noticia aquí.
Review de las Google Glass
Se anunció un nuevo modelo de Google Glass para el para este año, que contarán con procesador Intel y estarán orientadas principalmente al mercado industrial y médico. Noticia
Aprovechando un chásis robótico que ya tenemos montado, vamos a configurar el robot Face Tracker utilizando una aplicación de Android que debemos instalar en un móvil.
La aplicación se basa en la funcionalidad de detección de caras de la cámara del móvil y controla el robot mediante conexión Bluetooth, de tal manera que el robot seguirá a un usuario cuya cara haya reconocido previamente.
- Descarga de la app (requiere Android 4.0 o superior) Aquí
- Instrucciones para construir un soporte vertical para el móvil Aquí
Me gusta más un soporte horizontal como el de este vídeo:
La empresa LEGO ha liberado el software de programación NXT-G 2.0 por lo que se encuentra disponible para su descarga en la sección de soporte de su web de robótica educativa. AQUÍ
Pinchando en el enlace podéis descargar una ISO* que debéis montar con algún programa tipo Daemon Tools o similar. El software funciona perfectamente con versiones actuales de Windows y Mac (excepto OS 10.10 Yosemite), y no hay problemas para su instalación en versiones de 64 bits, al menos con Windows 7.
Los que tengáis Windows 7 Starter debéis realizar una pequeña modificación en el archivo setup.ini de la ISO*
Abrid la ISO y localizad el archivo setup.ini
Editad el archivo con el bloc de notas. Para ello debéis localizar la sección [OS] dentro del archivo.
En esa sección debéis escribir la siguiente línea (sin comillas): "AllowWindowsStarter=1"
Guardad cambios y proceded a la instalación del software.
Si tenéis algún problema, comentádmelo y os proporcionaré una copia del setup.ini modificado.
También podéis descargar un simulador del robot NXT "Virtual Brick" y comprobar en él vuestras programaciones. El simulador se encuentra disponible aquí, y la guía de usuario (en inglés) aquí.
A falta de tres semanas para que finalice el curso, conviene que vayáis pensando y anotando ideas para tratar de mejorar esta "prótesis" de mano robótica de las fotos.
Lo más importante es tratar de lograr que la estructura y función de los dedos de la mano robótica sea lo más similar posible a una mano real, y realizar la programación para emular sus movimientos con precisión.
En el siguiente vídeo podéis observar que el dedo pulgar de esa mano robótica no tiene una posición muy adecuada y por lo tanto no está realizando correctamente su función. Ese es el primer aspecto que debéis mejorar.
El lunes veremos las características del software y las opciones generales de la interfaz gráfica de programación. También quiero que realicéis unos bloques sencillos de instrucciones con los servomotores:y el sensor ultrasónico: el robot debe realizar el recorrido indicado en la imagen que tenéis abajo y volver al punto inicial de manera autónoma. Os indicaré en clase las distancias que debe recorrer.
SIN UTILIZAR SENSORES.
El robot debe llegar al punto indicado con el recuadro negro en el plano, rotar 180º y volver al punto de partida. Esta programación requiere un control muy preciso sobre los servomotores.
UTILIZANDO EL SENSOR ULTRASÓNICO.
Debe realizar el mismo recorrido que en el caso anterior pero el control sobre los servos estará determinado por la información recibida por el sensor de distancia. En cada curva situaremos un obstáculo de tal manera que el robot "debe decidir" girar.
Para esta actividad debéis utilizar vuestros robots aunque llevaré este de la foto de abajo, y aprovecharemos para grabar el recorrido del robot.
Todo apunta a que de aquí a unos años va a ser cada vez más difícil y más caro extraer petróleo. Las sociedades industrializadas están basadas en el petróleo y sus derivados, casi todos los aspectos de nuestra vida están ligados al petróleo y el gas natural: producción de electricidad, combustible para maquinaria y transporte, industria química y farmaceútica...y sobre todo la producción de plástico.
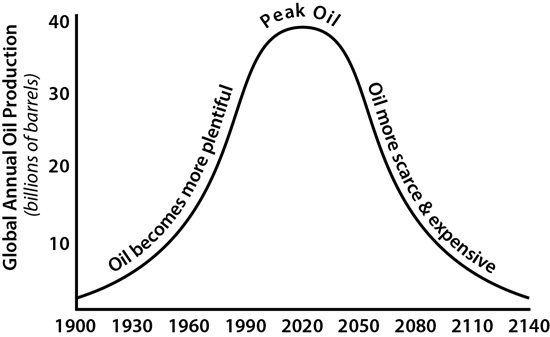
La teoría del Pico de Hubbert (Peak Oil) o cénit del petróleo se refiere al punto en el tiempo en el que la producción global de petróleo alcanza un pico máximo a partir del cual comienza a decaer, pudiéndose originar un hipotético escenario futuro en el que la demanda superaría la producción, originándose un encarecimiento importante del precio del petróleo debido al mayor coste de extracción y agotamiento de las reservas.
Esta teoría se formuló en 1956 y está sujeta a revisiones o modificaciones en el tiempo. Existen controversias y opiniones dispares acerca de esta teoría: hay autores que afirman que ya hemos alcanzado el cénit de la producción de petróleo, otros dicen que se alcanzará entre los años 2020 - 2030, y un tercer grupo de autores afirma que es errónea.
En este podcast creado por los autores de la web www.Noticias21.com se tratará de manera amena y sin tecnicismos sobre los orígenes de la explotación del petróleo como combustible, los problemas geopolíticos que ha originado, y sobre todo se profundizará sobre una de las mayores amenazas que se ciernen sobre nuestra civilización hoy en día: el fin del petróleo "barato".
Es mucho más cómodo escuchar los podcast utilizando el móvil con unos auriculares. Yo suelo utilizar la app Ivoox que tiene un buscador y permite crear listas de audios.
QUIZÁS TAMBIÉN OS PUEDE INTERESAR...
El libro "La economía del hidrógeno" (resumen - sinopsis) redactado por Jeremy Rifkin, quien promulgó la teoría de la Tercera Revolución Industrial, basada en las tecnologías de la información y el cambio de modelo económico-energético a otro basado en el hidrógeno ante el más que previsible futuro agotamiento de los combustibles fósiles.
En el mes de septiembre del año 2002 un grupo de arqueólogos especializados en historia egipcia utilizó un robot sonda con el fin de explorar los canales de la Gran Pirámide que conducen hasta la cámara de la reina. Anteriormente otros científicos realizaron exploraciones similares pero se encontraron con dificultades y limitaciones técnicas para avanzar.
Este robot llamado "Pyramid Explorer" tardó aproximadamente dos horas en recorrer los 65 metros de longitud del canal que, debido a su inclinación, provocó algunos problemas de tracción motriz. Después de algunos contratiempos, por fin pudo llegar a su destino y taladrar la pared que había en el otro extremo, con el fin de introducir una minicámara de vídeo.
¿Qué encontraron tras la misteriosa puerta?
Este vídeo nos servirá de inspiración para la actividad que realizaremos construyendo uno de los robots exploradores incluidos en el libro LEGO NXT: The Mayan Adventure:
El objetivo es montar un pequeño robot que tendrá que simular que avanza por un canal de una pirámide maya para explorar su interior y tratar de localizar posibles restos arqueológicos. La finalidad del vehículo robótico es que, además de evitar quedarse atascado, pueda tomar imagenes de su interior, por ello sería buena idea que llevara adosado un móvil.
Se deberán programar los sensores y motores para evitar que el robot se quede atascado durante el recorrido que simularemos, y deberá volver al punto de partida por sí mismo.
El miércoles os llevaré un PDF muy interesante. Si podéis, traed un pendrive.
He modificado algunos parámetros de la programación de los servomotores -sobre todo del que acciona las pinzas- para que realice movimientos más suaves.
Voy a incluirlo en el listado de robots que quiero que montéis en las sesiones finales del curso. Estructuralmente es el más complejo de todos los robots del cuaderno pero es muy interesante para profundizar en el tema de las ruedas dentadas y engranajes en general.
Adjunto el listado de algunos de los bloques de instrucciones que se pueden introducir en el "NXT brick"desde el menú NXT Programs.
Quiero que ampliéis el chasis básico con un sensor y realicéis una programación sencilla. Tomad como ejemplo las siguientes secuencias de instrucciones:
Tal y como podéis comprobar en la imagen anterior, el primer y tercer bloque son de salida (motores y actuadores), el segundo y cuarto bloque son de entrada (sensores), y el último bloque sirve para introducir la función LOOP (repetir indefinidamente la programación) o STOP (detener el programa).
Las instrucciones para montar las ampliaciones con los módulos de sensores están en la sección [apuntes y documentos] del menú principal del blog, lo más adecuado es que cada grupo monte una ampliación con un sensor diferente. Recordad que cada sensor tiene su puerto específico de conexión.
Ampliación con el módulo del sensor de contacto:
También os recomiendo que descarguéis los siguientes documentos:
Guía rápida de uso de los sets de robótica LEGO Mindstorms NXT. Enlace
Varios fabricantes del sector de la automoción han desarrollado sistemas inteligentes "empotrados" en vehículos con el fin de mejorar la seguridad de sus ocupantes. Volvo ha incorporado en algunos de sus camiones un sistema autónomo de frenada de emergencia que mediante un sensor de proximidad y una cámara es capaz de determinar una posible colisión con un obstáculo en la carretera y frenar sin intervención del conductor.
El sistema funciona de la siguiente manera: el radar (sensor de proximidad) está situado en la rejilla de la parte frontal del camión detectando en todo momento la distancia a los vehículos que le preceden, y la cámara, que está situada en la parte superior del parabrisas, detecta el tipo de obstáculo. La información de estos dos sensores es procesada por una centralita (el cerebro del sistema inteligente) que en base a la velocidad del camión determina el riesgo de colisión. Cuando este sistema detecta un peligro inminente de colisión emite una señal visual y acústica para advertir al conductor y, en caso de que éste no frene, al cabo de un segundo se activará el freno de emergencia de manera automática con el fin de detener el camión.
Vídeos del funcionamiento del sistema en un circuito de pruebas
Sistema anticolisión similar al de Volvo, desarrollado por la empresa Mercedes.
El objetivo de las empresas de automoción es implantar estos sistemas en turismos ya que la mayoría de los golpes y atropellos con el coche se producen en conducción en ciudad a baja velocidad.
Sistemas de seguridad implementados en la actualidad en algunos coches de alta gama:
Freno automático.
Detección de salida de carril y corrección automática de trayectoria del coche.
Asistencia en puntos ciegos de visibilidad en retrovisores para evitar colisiones laterales.